

DonkeyCar Origin Story - The Self Driving Toy Car
DonkeyCar Origin Story - The Self Driving Toy Car
A project to kickstart self driving transit.

A project started to demonstrate the viability of self driving busses could turned into the most popular open source self driving RC car platform that over 5000 people have built.
In 2016 I wanted to show that self-driving busses would be more efficient than subways that have to run on steel rail that's really hard to update and change routes. So I pitched an idea of a self driving small scale competition to the former editor of wired Chris Anderson and he has a great network and organized a the first DIYRobocars meetup at Carl Bass’ warehouse in Berkeley to build self driving cars and race them. I went there without anything in hand but there was a great turn out.
At the meetup I found the simplest looking car and asked the builder(Adam Conway) if I could help him. He was stoked to have help we got the car to turn one direction before that day’s race.
During the race I looked for the most intriguing autopilots. Most of them were trying to do CV to recognize the lines of the course. One team lead by a Brazilian, Otavio, had a car that used end neural networks. They would drive around the track to capture training data (image + steering values) and then train the steering of the car based on that data. These this led to a fast but crazy race run. His code was open source and so I looked at how it was written and refactored it for Adam’s car.
Here’s Otavio and his car at the first race.
I built my own car right after that first event and copied Adam's hardware setup. He was nice enough to cut and print some of the hardware so I didn't have to live with a cardboard body for long.
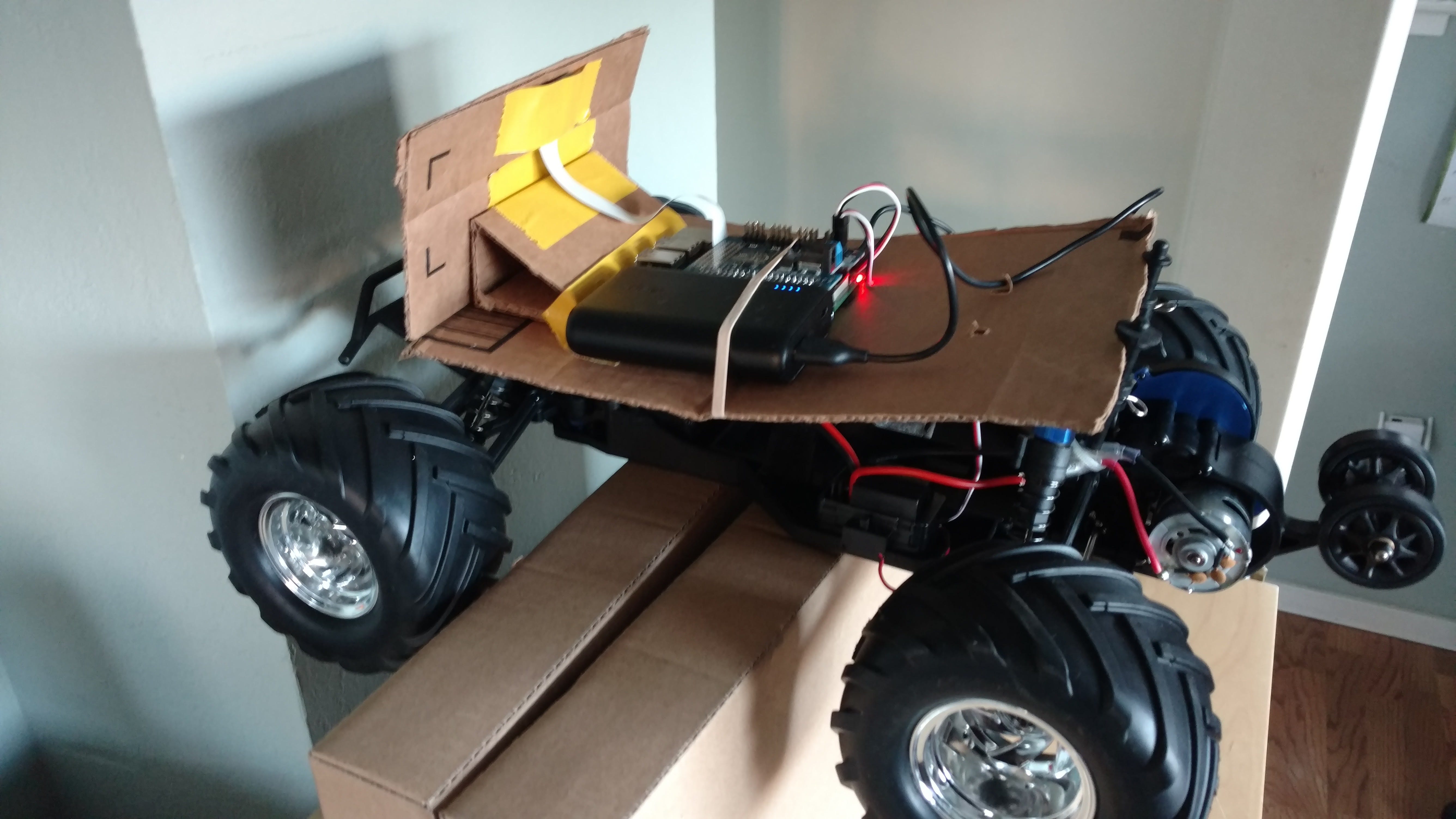
Adam and I put time into making the design easy to replicate. We found a car that could be purchased easily we made the code easy to add to the car and just documented the whole process as well as we could. Plus we had a settled on a recognizable name of DonkeyCar. Name came from the donkey being one of the first domesticated animals and it sometimes refuses to do what you want it to. We made a website (donkeycar.com) to share all the resources to build your own.

The races happened on a quarterly basis and Chris would find awesome venues like old steel plants and art studios that had a concrete floor where we could put up a track. He is a master organizer.


The car became the most popular design and lots of people helped out with the hardware and the code. For a long time we would win every race. Amazon even had us come to their developer conference to host an event where 50 people built their own DonkeyCars.

One of the difficulties with training a good autopilot was the iteration time was slow. You had to collect data, train, then load it on the car and test it out. To fix this Tawn Kramer made a Unity simulator that for ConkeyCar that would let us test our autopilots without even needing a physical car. During COVID the DIYRobocar races were held online using this simulator.
It was only after Andy really fixed up his car that used maps / SLAM when we started to lose.
Today there are people all around the world building DonkeyCars.
While I’m no longer contributing the project, its rewarding to think that some engineers working on full self driving cars got their start using DonkeyCar.
It’s still my hope that we’ll replace subways with self driving cars.